Istituto di Formazione Professionale in Ambito Scientifico
Sistemi stereofotogrammetrici 3D optoelettronici
I sistemi stereofotogrammetrici 3D optoelettronici (Medved 2001) sono strumentazioni con particolari telecamere che proiettano un fascio di infrarossi all’interno del loro campo visivo e che acquisiscono i dati da riferimenti catarifrangenti applicati sul soggetto, che rifrangono il fascio proiettato dalle telecamere (Figura 27). Una volta che il fascio di infrarossi viene rifratto dai marker, le […]

I sistemi stereofotogrammetrici 3D optoelettronici (Medved 2001) sono strumentazioni con particolari telecamere che proiettano un fascio di infrarossi all’interno del loro campo visivo e che acquisiscono i dati da riferimenti catarifrangenti applicati sul soggetto, che rifrangono il fascio proiettato dalle telecamere (Figura 27).
Una volta che il fascio di infrarossi viene rifratto dai marker, le telecamere hanno la possibilità di seguirne i movimenti descrivendo attraverso particolari software di analisi tutte le caratteristiche cinematiche del moto.
Il posizionamento delle telecamere descrive un volume all’interno del quale il movimento è analizzabile, fuori da questo volume non si ha possibilità di analisi.
Il volume di analisi è lo “spazio minimo comune denominatore” del campo visivo di ogni telecamera.
È possibile aumentare il volume allontanando le telecamere, ma in certi casi le posizioni sono fisse (alcuni laboratori hanno le telecamere fissate al muro o al soffitto).

Figura 27 – Esempio di setting del sistema optoelettronico, nel cerchio rosso la telecamera ad infarossi e sul soggetto i marker passivi catarifrangenti.
Marker Attivi e Passivi
I marker applicati sul soggetto sono detti “passivi” quando non godono di luce propria e riflettono la luce infrarossa proveniente dalle telecamere (Figura 28), mentre sono detti “attivi” quando si illuminano autonomamente.
La letteratura sembra suggerire che l’accuratezza e la frequenza di campionamento dell’utilizzo di marker passivi non sia alla pari di quella dei marker attivi (Durlach et al., 1995), ma l’assenza di cavi, batterie e circuiti d’accensione dei marker è un importante vantaggio in fase di analisi (Chiari et al., 2005).
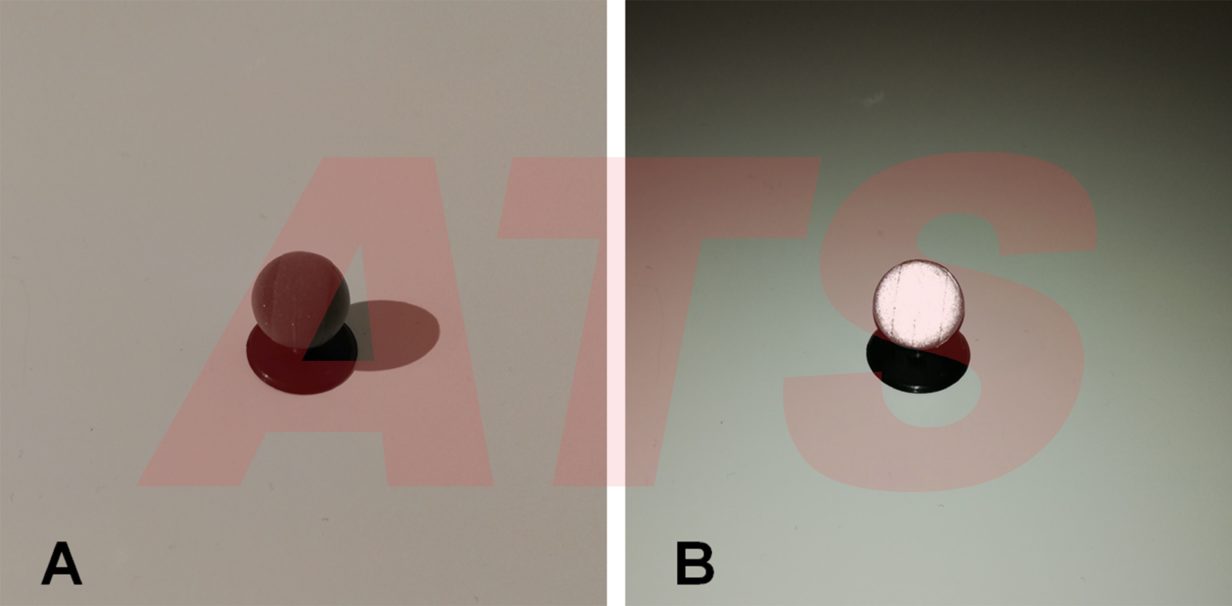
Figura 28 – Esempio di marker passivo. A: foto senza flash. B: foto con flash. Nella foto con il flash è possibile vedere che il materiale del marker riflette la luce dalla quale è illuminato cambiando colore e diventando più luminoso. Lo stesso accade quando il marker viene colpito dal fascio di infrarossi, il quale si rifrange sul marker tornando verso la telecamera che lo sta riprendendo.
Il posizionamento dei marker sui punti repere del soggetto avviene manualmente e deve essere fatto da personale esperto, con formazione specifica e adeguata e con nozioni di anatomia palpatoria (Figura 29).

Figura 29 – Operazione di applicazione dei marker sul soggetto
Modello
La modalità con cui vengono applicati i marker viene solitamente chiamata “modello”.
In letteratura ve ne sono molti validati per l’analisi della deambulazione in soggetti adulti e giovani (Ferrari et al., 2008; McGinley et al., 2009), tuttavia alcune analisi richiedono dei protocolli che non sono stati ancora studiati, per cui il posizionamento dei marker viene personalizzato senza perdere, in alcuni casi, anche la possibilità di calcolare il centro di massa dei soggetti (Sibella et al., 2007).
Di seguito sono elencate alcune regole generali di posizionamento dei marker sul soggetto, indipendentemente dal tipo di modello utilizzato, (Cappozzo et al., 1995):
- ogni marker deve essere visibile almeno da due videocamere in ogni istante;
- i marker posizionati sullo stesso segmento devono essere adeguatamente distribuiti per minimizzare l’errore di posizionamento e orientamento dell’osso;
- i movimenti tra marker e osso sottostante devono essere minimi;
- dovrebbe sempre essere possibile posizionare dei marker anche in presenza di applicazioni esterne come protesi ecc.;
- il fastidio apportato dal marker al soggetto analizzato deve essere minimo;
- il montaggio dei marker sul soggetto deve essere soprattutto rapido, semplice e sicuro.
Segmenti
I marker applicati sul soggetto formano dei “segmenti” che ne identificano le porzioni anatomiche e, in quanto tali, vengono trattati come segmenti rigidi, il che permette di applicare le leggi della meccanica classica.
A ogni modo, sia in presenza di modelli validati che personalizzati e adattati alle esigenze, va sottolineato che la maggior fonte di errore di misura con questi strumenti è proprio la mancanza della dovuta accortezza nel posizionamento dei marker (Gorton III et al., 2009), a questo tipo di errore si associano gli artefatti sui risultati delle analisi del movimento dettati dai movimenti dei tessuti molli (Andriacchi et al., 2000).
Il posizionamento dei marker, a volte, può essere fonte di errore in quanto, l’individuazione attraverso la palpazione dei reperi anatomici su cui collocare il marker può essere inficiata da tre aspetti (Della Croce et al., 2005):
- i reperi anatomici non sono dei punti, ma delle superfici, a volte larghe e irregolari;
- uno strato di tessuto di spessore variabile copre i reperi anatomici;
- l’identificazione del repere dipende dalla procedura di palpazione adottata.
Altre fonti di errore possono essere sistematiche e dovute alle procedure di calibrazione oppure random e dovute a segnali fantasma o rumori elettronici di fondo (Chiari et al., 2005); altre fonti ancora di errore possono essere i movimenti della pelle che avvengono prevalentemente nei dintorni delle articolazioni (Cappozzo et al., 1996) o le deformazioni cutanee per effetto della contrazione muscolare (Leardini et al., 2005).
Errori
Pur essendo necessario eseguire un’analisi del movimento con tutte le accortezze appena elencate, va detto che la letteratura stessa ammette che, secondo alcune esperienze riportate nello svolgimento dell’analisi del passo, ci sono delle evidenze sufficienti per dire che questi sistemi possono mostrare degli errori clinicamente accettabili (McGinley et al., 2009).
Una volta scelto un modello e posizionati i marker sul soggetto, operazione per la quale si possono seguire diverse metodiche (Cappozzo et al., 2005, Chiari et al., 2005), è necessario calibrare lo spazio dove si svolgerà il movimento che verrà ricostruito dalle telecamere ad infrarossi (Figura 30).
Lo spazio che viene inquadrato dalle videocamere dipende innanzitutto dal numero delle periferiche di acquisizione (telecamere), e poi dalla loro disposizione. Questo spazio avrà, quindi, un volume che prenderà il nome di “volume calibrato”.
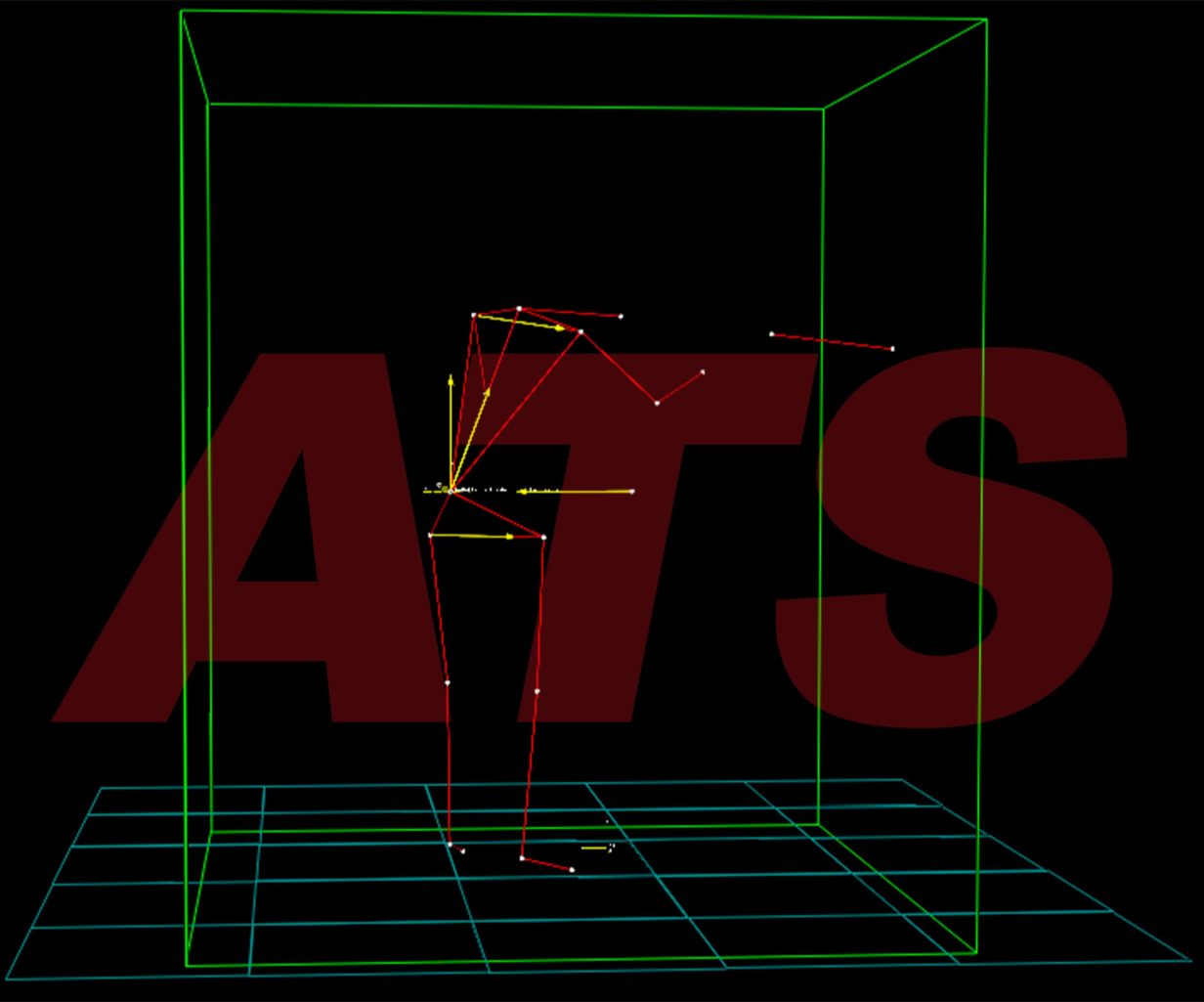
Figura 30 – Ricostruzione 3D Tiro a volo. In verde il volume calibrato all’interno del quale è possibile svolgere misurazioni
Calibrazione
Per calibrare lo spazio di acquisizione che le telecamere riescono a riprendere, si utilizzano delle metodiche specifiche che cambiano a seconda della strumentazione.
In termini generali, però, si può spiegare il processo di calibrazione come un passaggio nel quale vengono fatte acquisire dal software delle immagini che riprendono oggetti di dimensioni note, attraverso le quali si possano fare delle proporzioni e delle ricostruzioni in scala (Chiari et al., 2005).
Alcuni sistemi, ad esempio, necessitano di due tipologie di calibrazione, una statica e una dinamica. La calibrazione statica viene effettuata attraverso l’acquisizione, da parte delle telecamere, di una terna di calibrazione, rappresentante i tre assi del movimento e posizionata nella zona di svolgimento del movimento. La calibrazione dinamica viene effettuata attraverso una bacchetta di dimensioni note che viene mossa all’interno del volume di acquisizione delle telecamere.
Sia la terna che la bacchetta di calibrazione sono composte da dei marker passivi riflettenti, la cui distanza relativa è nota dal sistema di acquisizione.
Tanto più preciso e accurato sarà il processo di calibrazione e tanto migliori saranno le analisi svolte in termini di precisione e riduzione dell’errore.
Asse X, Y e Z
Poiché lo spazio calibrato è tridimensionale, la terna di calibrazione è formata da tre assi: convenzionalmente e come raccomandato dall’International Society of Biomechanics, l’asse X descrive il movimento verso l’avanti-dietro, l’asse Y quello verticale e l’asse Z il movimento laterale (Wu et al., 1995; Wu et al., 2002).
Nei casi in cui la collocazione degli assi di riferimento non dovesse seguire questa disposizione spaziale, è opportuno dichiararlo (specie nei lavori scientifici di ricerca).
Poiché la posizione di un marker, che sia sul soggetto o che sia nel sistema di riferimento per la calibrazione, deve essere ricostruita con coordinate 3D, è fondamentale che esso venga “visto” almeno da due videocamere. Quando almeno due telecamere riescono a inquadrare un marker, i fasci infrarossi delle due periferiche intercettano il marker stesso e ritornano alle telecamere, ricostruendo la sua posizione nello spazio.
Va sottolineato che il numero minimo di due videocamere è solamente teorico; in pratica poi conviene sempre che uno stesso marker sia visibile a più di due videocamere, in quanto, durante i gesti analizzati, specie quelli molto complessi, il movimento delle braccia o di altri segmenti corporei potrebbe coprire il marker indagato (Chiari et al., 2005).
Il grado di precisione con cui vengono ricostruite le posizioni spaziali dei marker varia da sistema a sistema a causa degli errori intrinseci dei sistemi di misura (Della Croce et al., 2000).
Revisione sui Sistemi Optoelettronici
Diversi anni fa è stata pubblicata una delle più importanti revisioni della letteratura sui sistemi optoelettronici e il loro relativo utilizzo nell’analisi del movimento. La revisione pubblicata su Gait & Posture, composta da una serie di lavori in sequenza, è tutt’oggi molto attuale e, sebbene non totalmente aggiornata, è ancora un ottimo materiale di studio che fornisce le basi per comprendere la metodica.
Questa serie di 4 articoli affronta il background e i fondamenti teorici dell’analisi stereofotogrammetrica (Cappozzo et al., 2005), gli errori degli strumenti di misura (Chiari et al., 2005), gli artefatti determinati dai movimenti della pelle e le strategie atte a compensarli (Leardini et al., 2005), la valutazione dell’errata determinazione dei reperi anatomici e il relativo effetto sui valori cinematici articolari (Della Croce et al., 2005).
Da quanto emerge dai lavori passati e dalle recenti pubblicazioni, i sistemi optoelettronici sono i più utilizzati nell’analisi del movimento da laboratorio e i limiti del passato circa l’effetto della luce e l’impossibilità di lavorare all’aperto si sono fortemente ridotti, fino a scomparire.
Restano dei limiti oggettivi all’utilizzo e alla divulgazione di questa ottima metodica di analisi del movimento, ovvero: i costi elevati di acquisto e di gestione della strumentazione, la relativa difficoltà e scarsa intuitività di utilizzo, la necessità di conoscenze base di programmazione avanzata di fisica e meccanica per l’utilizzo e l’analisi dei dati, i lunghi tempi di preparazione del setting e dell’analisi dei dati.
Articolo tratto dal libro Biomeccanica® Principi di Biomeccanica e applicazioni della Video Analisi al movimento umano vincitore del premio letterario CONI

